インプットデバイス(センサー)
周辺環境情報を取得し送信する。
人間でいったら「感覚器官」。耳や目、皮膚など。
デジタルセンサーとアナログセンサーがあり、デバイスそのものは、
デジタルはHIGHかLOW(0か1)などの数値を離散的に返し、
アナログは0〜1023などの値を概ね電圧を使い連続的に返す。
デバイスによっては,デジタル信号を返すものもある。
getSensVal
センサーで情報を取得し,パソコンのシリアルポートから値を受け取ってみる
事前準備
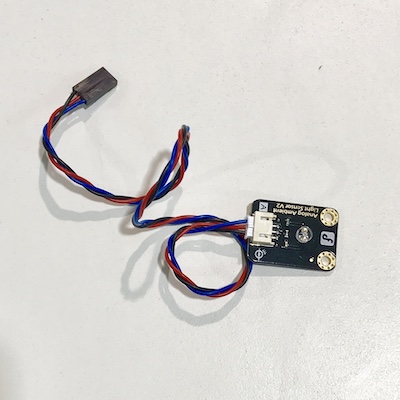
- 電源を入れていない状態で,センサーをArduinoにつなぐ
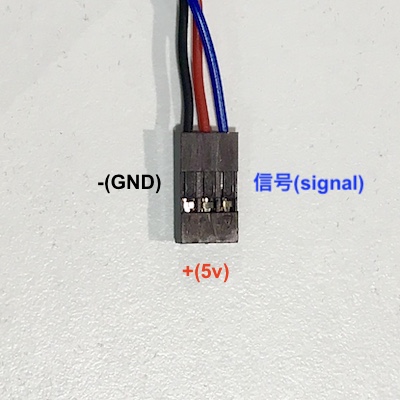
- センサーから出てきている線は3本
- それぞれ以下のような配置
- ジャンパー線を使って,Arduinoと接続する信号はA0

!写経!
//getSensorVal
void setup() {
// 9600bpsで通信をするように,シリアルポートを初期化
Serial.begin(9600);
}
void loop() {
// アナログピン0(A0)の値を読み,セットバリュー変数に格納
int sensorValue = analogRead(A0);
// 読み込んだ値をシリアルポートに(IDEで読める形で)送信
Serial.println(sensorValue);
// 安定的に値を読めるように,1/1000秒まつ
delay(1);
}
アップロード&値を取得
- 先ほどの手順と同様に検証後のアップロード
- 組み込みLEDがフラッシュしたら、エディタの左側にある"Monitor"を開く
task
- 色々な種類のセンサーを使って、返ってくる値を確認する
アウトプットデバイス(アクチュエーター)
命令に合わせて何かしらの仕事をし出力する。
人間で言ったら、筋肉や声帯など。
DCモータは電流から磁場を発生し回転運動に変え、
サーボモータは上記と仕事+信号を受け取りた上で、位置(角度)の制御が可能。
ディスプレイは液晶などを使い図形を描ける。
スピーカーは音が出て、LEDは光るという仕事をそれぞれ行える。
helloServo
ContinuousRotationServo(連続回転サーボ)を動かしてみる
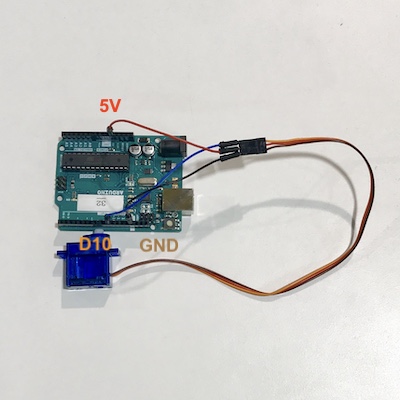
事前準備
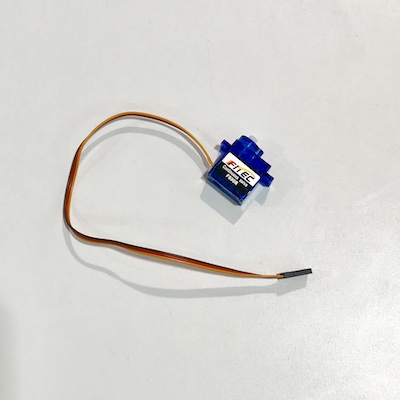
- 電源を入れていない状態で,サーボをArduinoにつなぐ
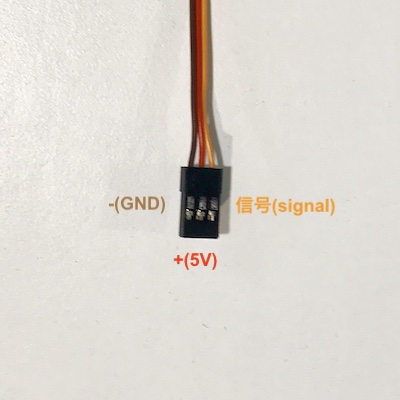
- サーボから出てきている線は3本
- それぞれ以下のような配置
- ジャンパー線を使って,Arduinoと接続する信号はD10
!写経!
//helloServo(continuousRotation)
// ライブラリの読み込み
#include
// サーボオブジェクトを作る
Servo myservo;
//中間位置を設定
const int neutral = 95;
void setup () {
myservo.attach(10); // サーボの信号ピンをD9に
}
void loop () {
// 時計回り高速
myservo.write(neutral - 90);
delay(2000);
// 停止
myservo.write(neutral);
delay(1000);
// 反時計回り高速
myservo.write(neutral + 90);
delay(2000);
// 停止
myservo.write(neutral);
delay(1000);
// 時計回り低速
myservo.write(neutral - 10);
delay(2000);
// 停止
myservo.write(neutral);
delay(1000);
// 反時計回り低速
myservo.write(neutral + 10);
delay(2000);
// 停止
myservo.write(neutral);
delay(1000);
}
サーボはどうやって制御されている?
- PWMで制御しています